六轴加速度计(MPU6050)
前言
MPU6050是一款高性能的6轴(三轴加速度+三轴陀螺仪)传感器模块,用于测试物体的运动姿态,I2C接口,常用于四轴飞控,平衡车等场景。
实验目的
通过python编程实现测量MPU6050加速度、角速度和温度值。
实验讲解
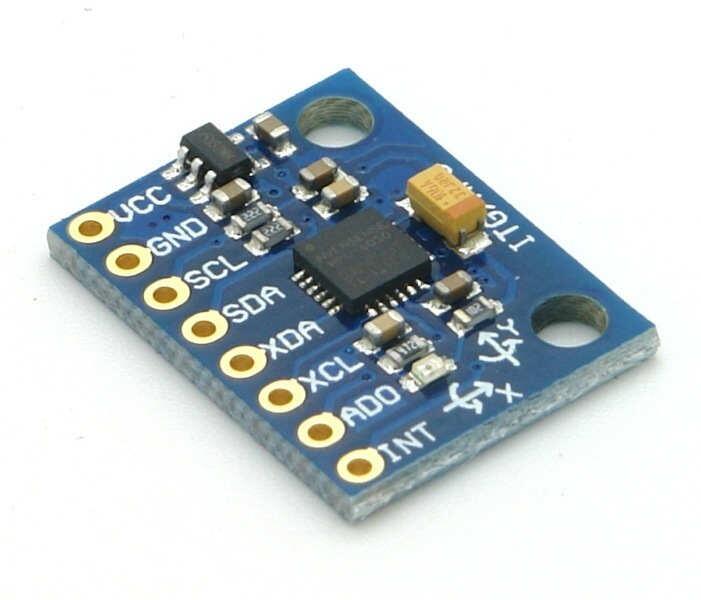
市面上大多MPU6050模块都通用,使用I2C总线通讯,下图是一款MPU6050传感器模块:
| 模块参数 | |
|---|---|
| 供电电压 | 3.3V |
| 通信方式 | I2C总线(默认地址:0x68) |
| 测量维度 | 加速度:3维 陀螺仪:3维 |
| 加速度测量范围 | ±2/±4/±8/±16g |
| 陀螺仪测量范围 | ±250/±500/±1000/±2000°/s |
| 温度传感器 | 测量范围:-40℃~85℃(精度:±1℃) |
| 引脚说明 | VCC: 接3.3V GND: 接地 SDA: I2C数据引脚 SCL: I2C时钟引脚 |
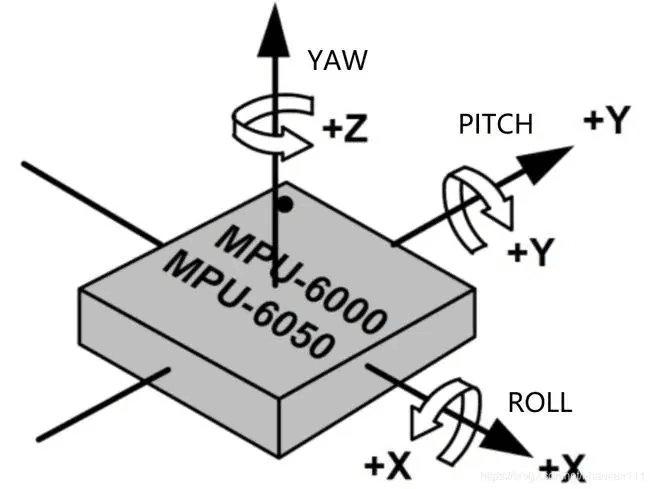
MPU6050六轴方向说明:
从上面介绍可以看到MPU6050是一款通过I2C接口驱动的传感器。我们通过核桃派PicoW的I2C接口编程,即可以对该模块实现数据通讯。
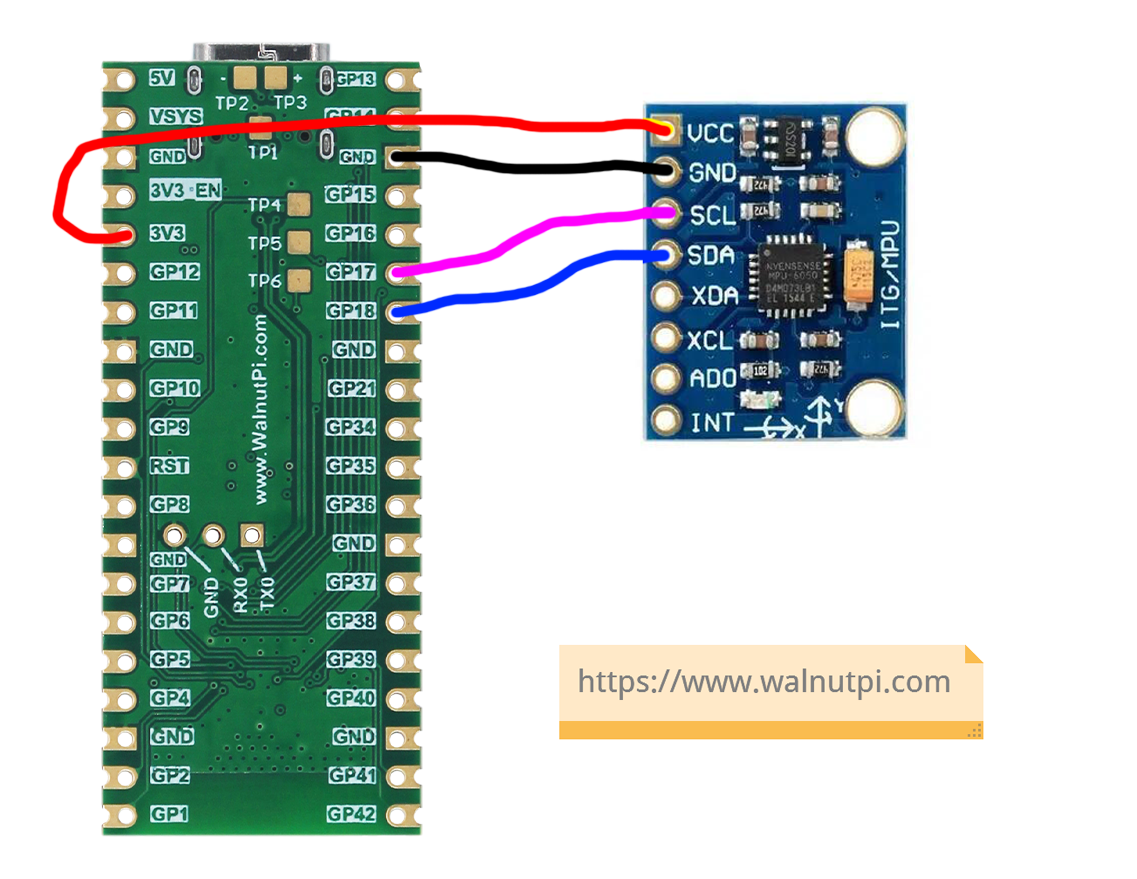
核桃派PicoW的MicroPython固件集成了软件模拟SoftI2C,支持任意GPIO引脚定义为相关引脚,非常方便。本例程使用核桃派PicoW的GPIO17连接MPU6050传感器SCL引脚,GPIO18连接SDA引脚,如下图:
本例程使用核桃派的I2C1来连接MPU6050传感器:
MPU6050对象
构造函数
mpu = mpu6050.accel(i2c, addr=0x68)
构建MPU6050对象。
参数说明:
i2c定义好的I2C对象。addr模块I2C地址。默认:0x68;
使用方法
mpu.get_values()
依次返回7个数据:
x、y、z的加速度值,单位m/s^2,数据类型为float
Temp温度值,单位℃, 数据类型为float
x、y、z的角速度值,单位rad/s,数据类型为float
理解了MPU6050传感器原理和对象使用方法后,我们可以整理出编程思路,流程图如下 :
参考代码
'''
实验名称:六轴加速度计(MPU6050)
版本:v1.0
作者:WalnutPi
实验平台:核桃派PicoW
说明:编程实现测量MPU6050加速度、角速度和温度值并在终端显示。
'''
from machine import SoftI2C,Pin
import mpu6050,time
#构建I2C对象
i2c1 = SoftI2C(scl=Pin(17), sda=Pin(18))
#构建MPU6050对象
mpu = mpu6050.accel(i2c1)
while True:
#打印六轴加速度计原始值
print(mpu.get_values())
#延时1秒
time.sleep(1)
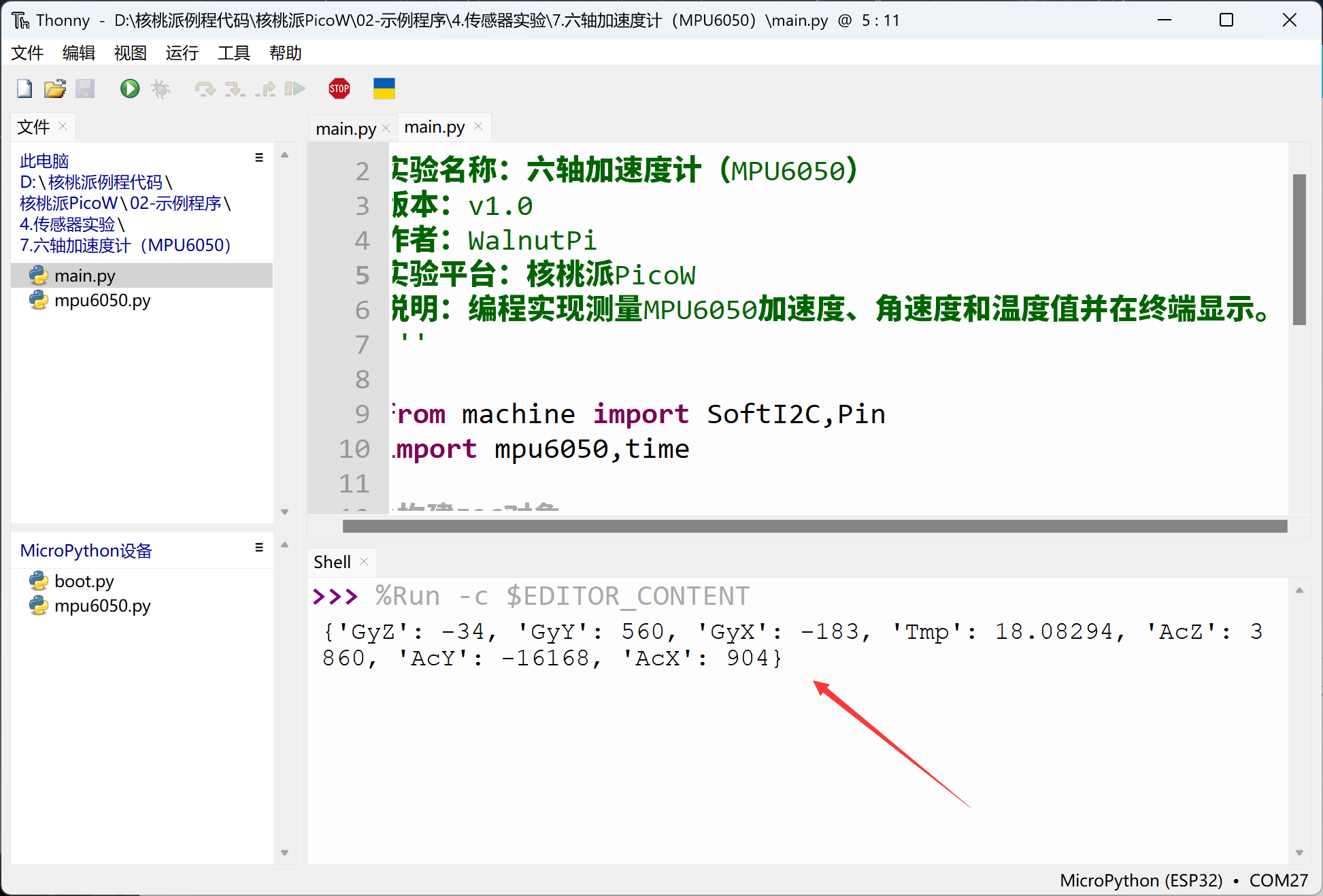
实验结果
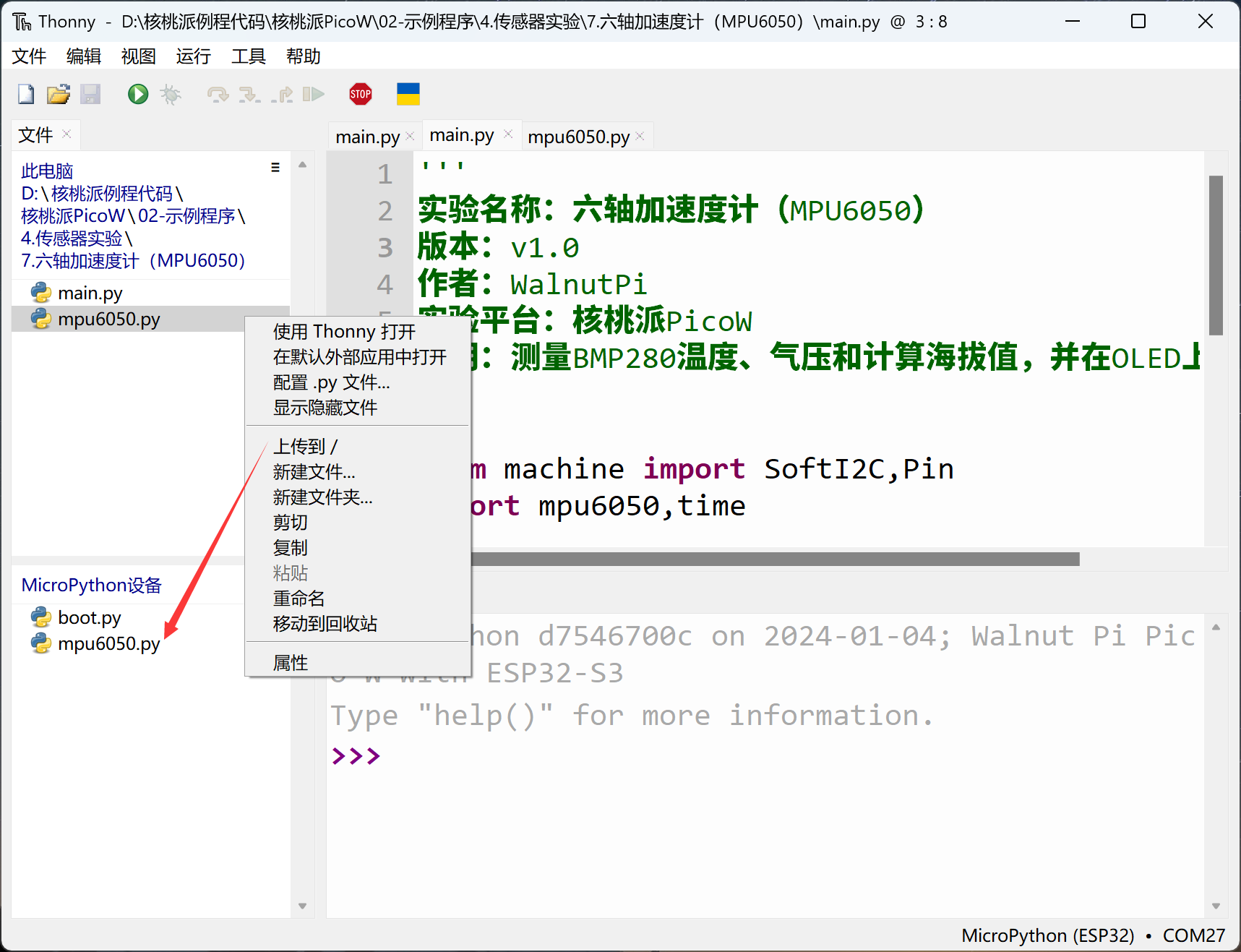
由于本例程代码依赖其它py库,所以需要将mpu6050.py文件上传到核桃派PicoW:
使用Thonny IDE运行主程序代码,可以看到终端打印出六轴加速度计MPU6050的7个原始数据: