SPI
配置引脚
找到板子上的spi引脚
为了方便查找,我们加入了一个显示功能引脚位置的功能,运行以下命令,查看板子的40pin引脚上有几个可用spi
gpio pin spi
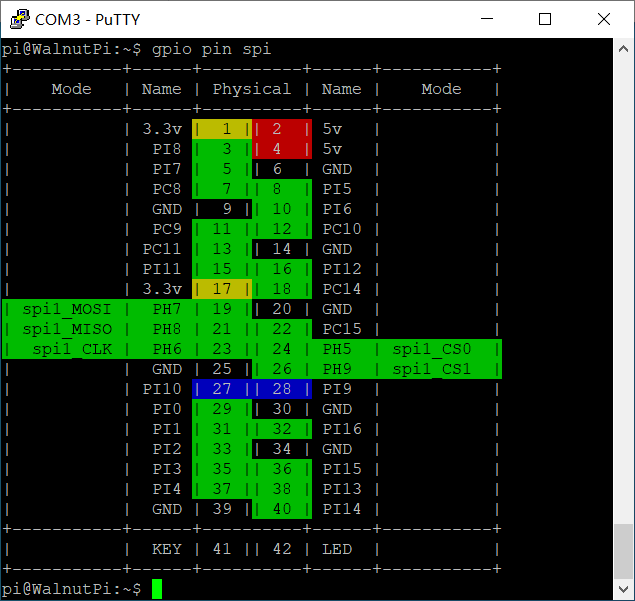
可以看到这块40pin排针里只有spi1,还有归属于spi1的两根cs引脚。一个spi接口可以同时连着多个模块,然后每个模块都连上不同的cs引脚,通过cs引脚来控制要与哪个模块通信。
启用spi-dev
我们使用set-device指令来使能/关闭指定设备的底层驱动,使能后,引脚就会由gpio模式切换为对应的引脚复用功能。(配置后要重启才能生效)
如果我们要操作spi1,首先需要使能spi1,然后使能一个spidev1_x。例如使能spidev1_0,他对应的是spi1-cs0。重启后就会出现一个/dev/spidev1.0文件,操作这个文件进行spi通信时,就会自动使能spi1的cs0引脚(拉低),并使其他所有cs引脚失效(拉高)。
注意,启用spidev1_0的时候,会使其他使用spi1-cs0的设备驱动全部会失效,比如3.5寸lcd屏。
我这里启用spidev1_0,注意要重启后才能生效
sudo set-device enable spidev1_0
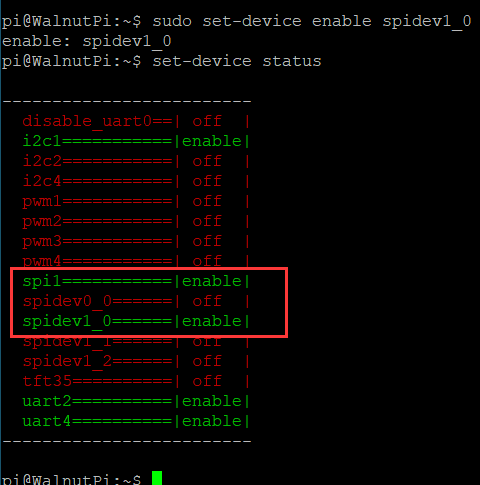
重启后发现出现了/dev/spidev1.0这个文件,因为后续我们需要通过操作这个文件来控制spi1_cs0的通讯
![]()
spi读写程序
我们要操作/dev/spidev1.0这个文件。通过open打开,用ioctl进行配置以及触发spi读写,close关闭文件。
1. 打开文件
linux下一切皆是文件,先使用open函数打开我们要操作的设备对应文件,获取文件描述符。
open函数需要这些头文件
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
open设备节点
int fd = open("/dev/spidev1.0", O_RDWR);
if (fd < 0)
{
perror("Fail to Open\n");
return -1;
}
2. 配置spi模式
spi模式,根据CPOL和CPHA不同,spi分为4种模式。不同芯片可能要求你以指定模式工作
ioctl函数需要这些头文件
#include <sys/ioctl.h>
配置为mode0,即CPOL=0,CPHA=0
static uint32_t SPI_MODE = SPI_MODE_0;
if (ioctl(fd, SPI_IOC_WR_MODE32, &SPI_MODE) == -1)
printf("err: can't set spi mode");
3. spi transfer
spi的两根引脚同时工作,MISO和MOSI是同步工作的。使用spi_ioc_transfer结构体来描述一次spi传输。spi可以拿来模拟不少协议,或者应该说是很多自称spi接口的芯片都有着怪怪的时序。
tx_buf,要从MOSI中发送出去的bufrx_buf,保存MISO内容的buflen, buf的大小speed_hz, spi传输速率cs_change,是否在传输完成后,保持cs线为选中bits_per_word,传输时单个word的大小delay_usecs, 发送完后来一段延时tx_nbits, 以几线制spi发送。4线的qspi也使用这套接口进行发送。所以留个接口供选择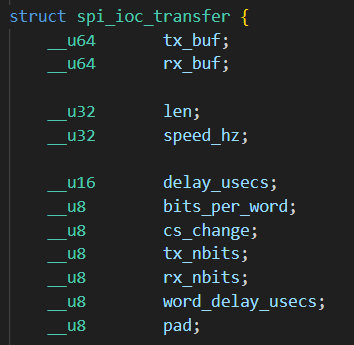
首先需要以下头文件
#include <linux/spi/spidev.h>
示例如下
static uint8_t BITS_PER_WORD = 8;
static uint32_t SPEED = 80 * 1000;
transfer.tx_buf = (unsigned long)tx_buf;
transfer.rx_buf = (unsigned long)rx_buf;
transfer.len = len;
transfer.delay_usecs = 500; //发送完成后的延时
transfer.speed_hz = SPEED;
transfer.bits_per_word = BITS_PER_WORD;
transfer.tx_nbits = 1; //单线制
transfer.rx_nbits = 1; //单线制
transfer.cs_change = 0; //传输后把cs线松开
然后通过ioctl函数,用SPI_IOC_MESSAGE(x)(x=传入的transfer的数量)就可触发一次spi transfer。每次发送一个clk,都会同时将tx_buf的内容从MOSI输出,读取MISO的内容存到rx_buf
int res = ioctl(fd, SPI_IOC_MESSAGE(1), &transfer);
if (res < 0)
printf("err: spi_transfer failed");
4. 关闭文件
每次open后记得调用close来手动关闭,不然文件描述符会保留直到程序关闭。而系统限制单个程序最大只能同时打开1024个文件,如果程序不停的open却不close,没一会就要报错退出了。
close(fd);
示例程序
这里使用ADC芯片mcp3004,4路输入转SPI输出。 首先阅读芯片手册搞清楚读取的步骤,如下↓
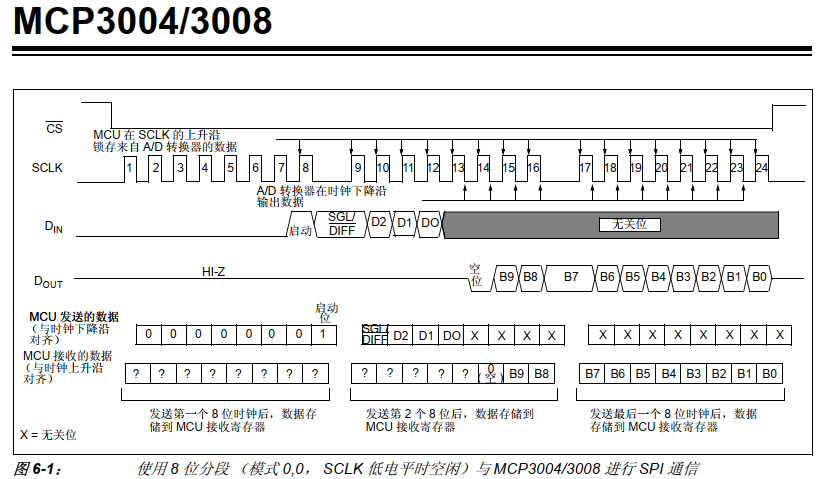
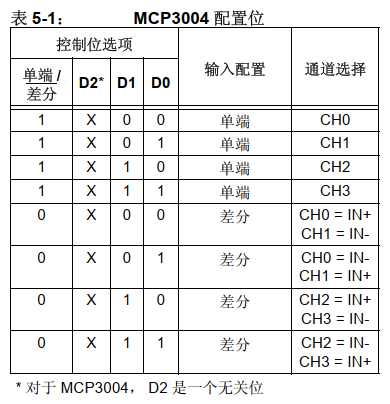
现在我想读取ch0的值,那么我需要发送3个字节的数据,第一个字节是0x01作为启动信号,第二个字节是配置字0x80,第三个字节无功能仅仅是为了触发接收。编写代码如下
#include <stdio.h>
#include <stdint.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <sys/ioctl.h>
#include <linux/spi/spidev.h>
#define DEV_SPI "/dev/spidev1.0"
static uint32_t SPI_MODE = SPI_MODE_0;
static uint8_t BITS_PER_WORD = 8;
static uint32_t SPEED = 100 * 1000;
// mosi跟miso同时工作,从tx_buf中取出数据发送的同时,也会读取数据存入rx_buf
int spi_transfer(int fd, uint8_t *tx_buf, uint8_t *rx_buf, int len)
{
struct spi_ioc_transfer transfer;
transfer.tx_buf = (unsigned long)tx_buf;
transfer.rx_buf = (unsigned long)rx_buf;
transfer.len = len;
transfer.delay_usecs = 500; // 发送完成后的延时
transfer.speed_hz = SPEED;
transfer.bits_per_word = BITS_PER_WORD;
transfer.tx_nbits = 1; // 单线制
transfer.rx_nbits = 1; // 单线制
transfer.cs_change = 0; // 传输后把cs线松开
int res = ioctl(fd, SPI_IOC_MESSAGE(1), &transfer); //触发transfer
if (res < 0)
printf("err: spi_transfer failed");
return res;
}
int main()
{
int fd0 = open(DEV_SPI, O_RDWR);
if (fd0 < 0)
{
perror("Fail to Open\n");
return -1;
}
// 配置spi模式
if (ioctl(fd0, SPI_IOC_WR_MODE32, &SPI_MODE) == -1)
printf("err: can't set spi mode");
uint8_t tx_buf[3] = {0x01, 0x80, 0x00};
uint8_t rx_buf[3];
// mcp3004要求以cs0的下降沿作为spi通信开始的标志
//因为当前spi1下只有一个cs0设备,所以初始时cs0一直是低电平
//先发送一个数据,触发cs0拉高
spi_transfer(fd0, tx_buf, rx_buf, 1);
uint16_t value;
while (1)
{
spi_transfer(fd0, tx_buf, rx_buf, 3);
value = (rx_buf[1] << 8) + rx_buf[2];
printf("value=%d\r\n ", value);
sleep(1);
}
return 0;
}
在开发板上编译很简单,我将代码写在文件spi.c内,想将其编译成名为exe的可执行文件,只需要执行下面这一句
gcc spi.c -o exe
测试结果如下,扭动连接在mcp3004通道0上的电位器,数值随之改变

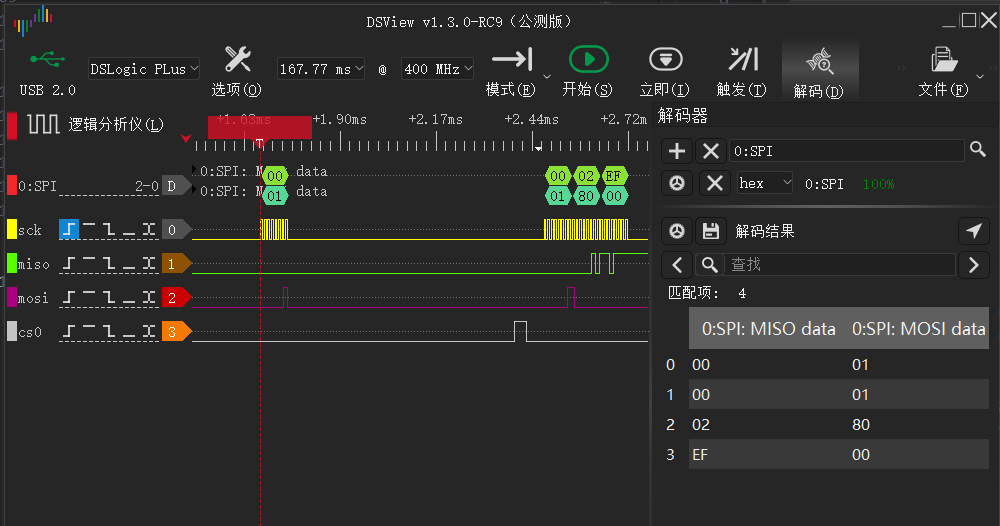
代码刚运行时的初始时序如下