GPIO指令操作
我们提供了一套在命令行快捷操作gpio的指令,本篇主要介绍该指令的使用方法
想使用python编程控制gpio,请点击这一章节 python嵌入式编程 - 点亮第1个LED
想使用c语言编程控制gpio,请点击这一章节 c嵌入式编程 - 控制gpio
从核桃派系统v2.3版本开始,废弃了基于wiringpi的引脚编号,改为使用排针编号来指代引脚。
查看所有引脚状态
使用下面指令可以看到核桃派所有引脚定义:
gpio readall
或
gpio pins
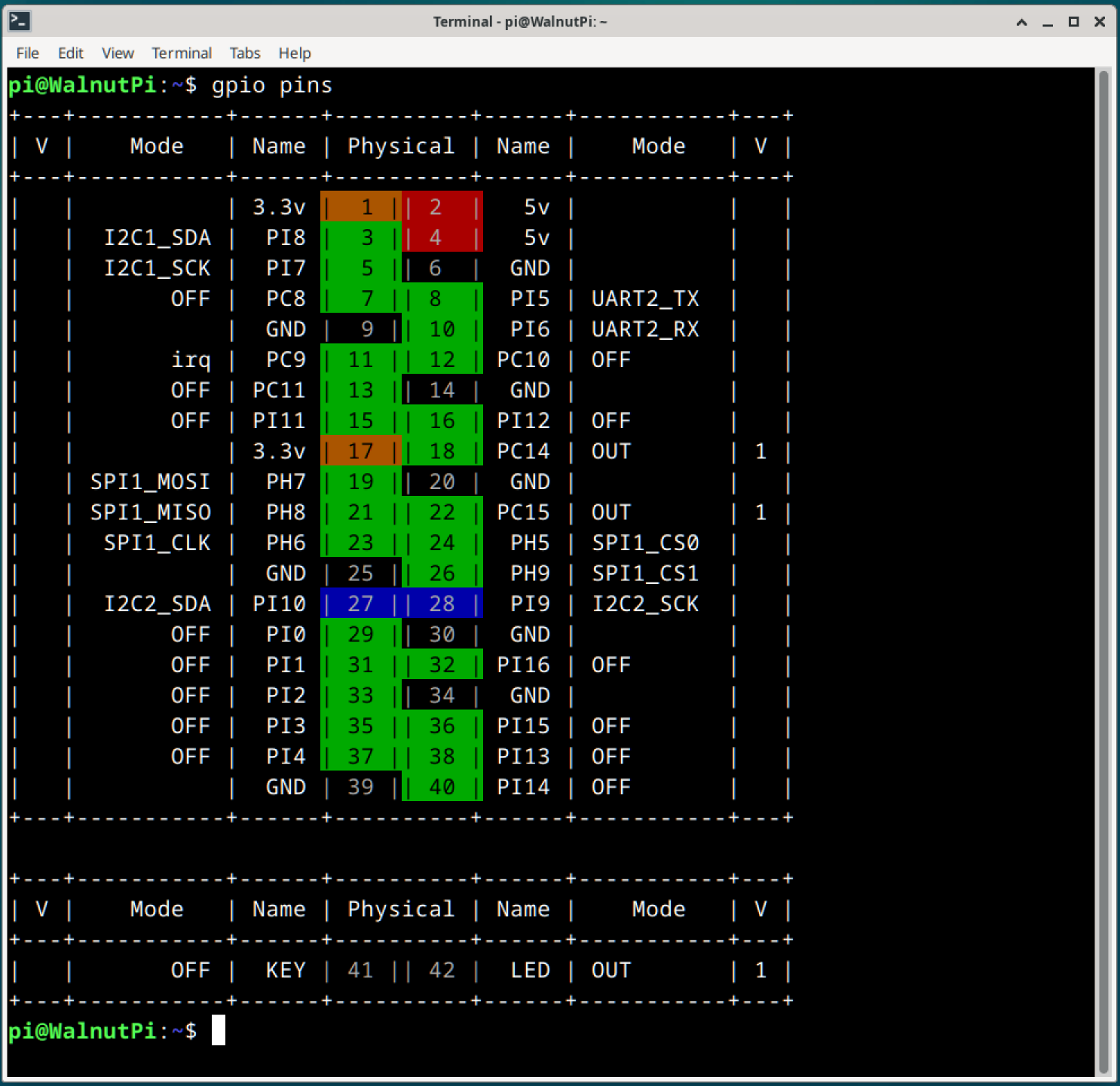
上图每一列含义如下:
Physical: 板上排针的编号,后续命令操作时都使用此编号Name: 引脚名称,在python编程时可使用此名称mode: 引脚当前所处工作模式:OFF: 初始状态未设置IN: 输入模式OUT: 输出模式其他: 引脚复用功能
V: 当引脚为 IN/OUT 模式时,引脚的电平状态,1为高电平,0为低电平
查看i2c/uart等引脚的位置
这是核桃派特有功能,为了方便用户查询。
gpio pin [function]
会输出一张表格显示具备该功能的引脚的位置
[function]:功能类型,可选择以下几个选项pwmuartspii2c
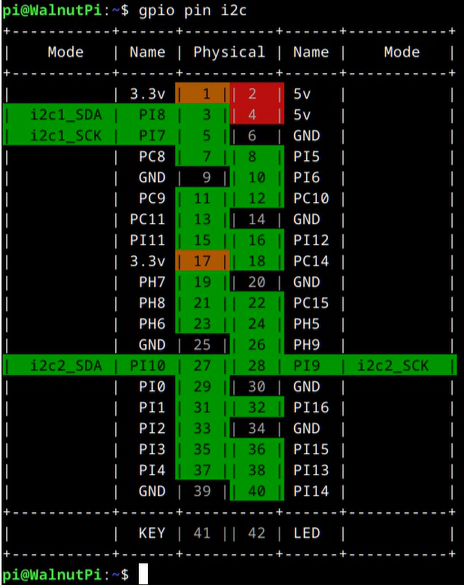
例如我想知道i2c引脚是哪些,可以输入下面命令:
gpio pin i2c
设置引脚功能
gpio mode [PIN] [mode]
[PIN]:目标引脚的排针编号,[mode]: 在下面几种中间选择:IN: 输入模式,浮空IN_PULLUP: 输入模式,开启内部上拉IN_PULLDOWN: 输入模式,开启内部下拉OUT: 输出模式OFF: 回归初始未使用状态
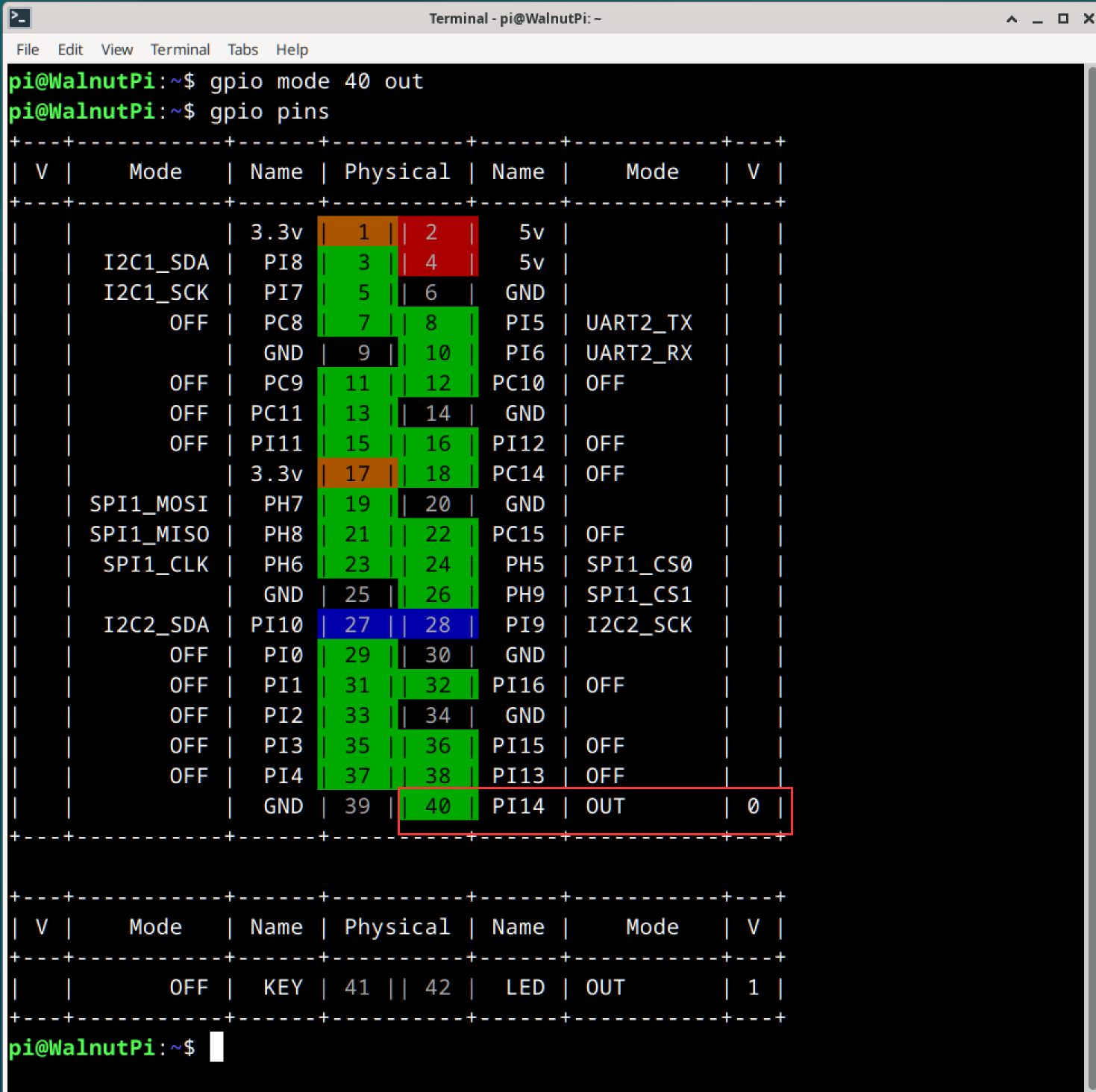
例如我要将引脚40设为输出模式,可以使用下面指令。
gpio mode 40 out
配置完成后再使用gpio pins指令查看引脚状态,可以看到PC8的引脚模式改成了OUT输出。
控制引脚输出电平
gpio write [PIN] [status]
[PIN]是你要控制引脚的wpi编号。[status]:引脚输出状态。0: 低电平(0V)1: 高电平(3.3V)
我们可以使用板载蓝色LED来测试一下,由于启动系统后LED默认点亮,我们这里可以使用指令将它熄灭试试。
从前面查表可以看到LED的pin编号为42,先设置LED引脚模式为输出:
gpio mode 42 out
再设置输出状态为0(低电平0V):
gpio write 42 0
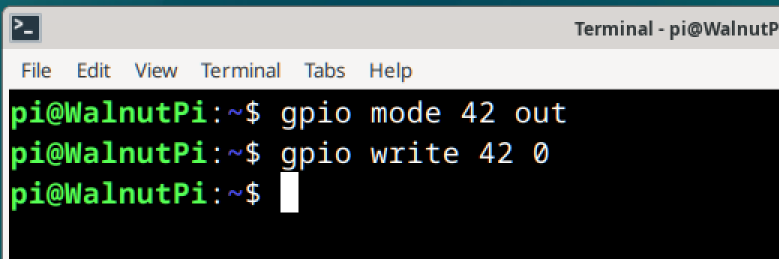
可以看到核桃派上的蓝灯熄灭了。
读取引脚输入电平
gpio read [PIN]
[PIN]:要读取引脚的编号。
我们可以使用板载按键来测试一下,读取按键的输入电平,核桃派板载按键没按下时输入1(高电平3.3V),按下是输出0(低电平0V)。
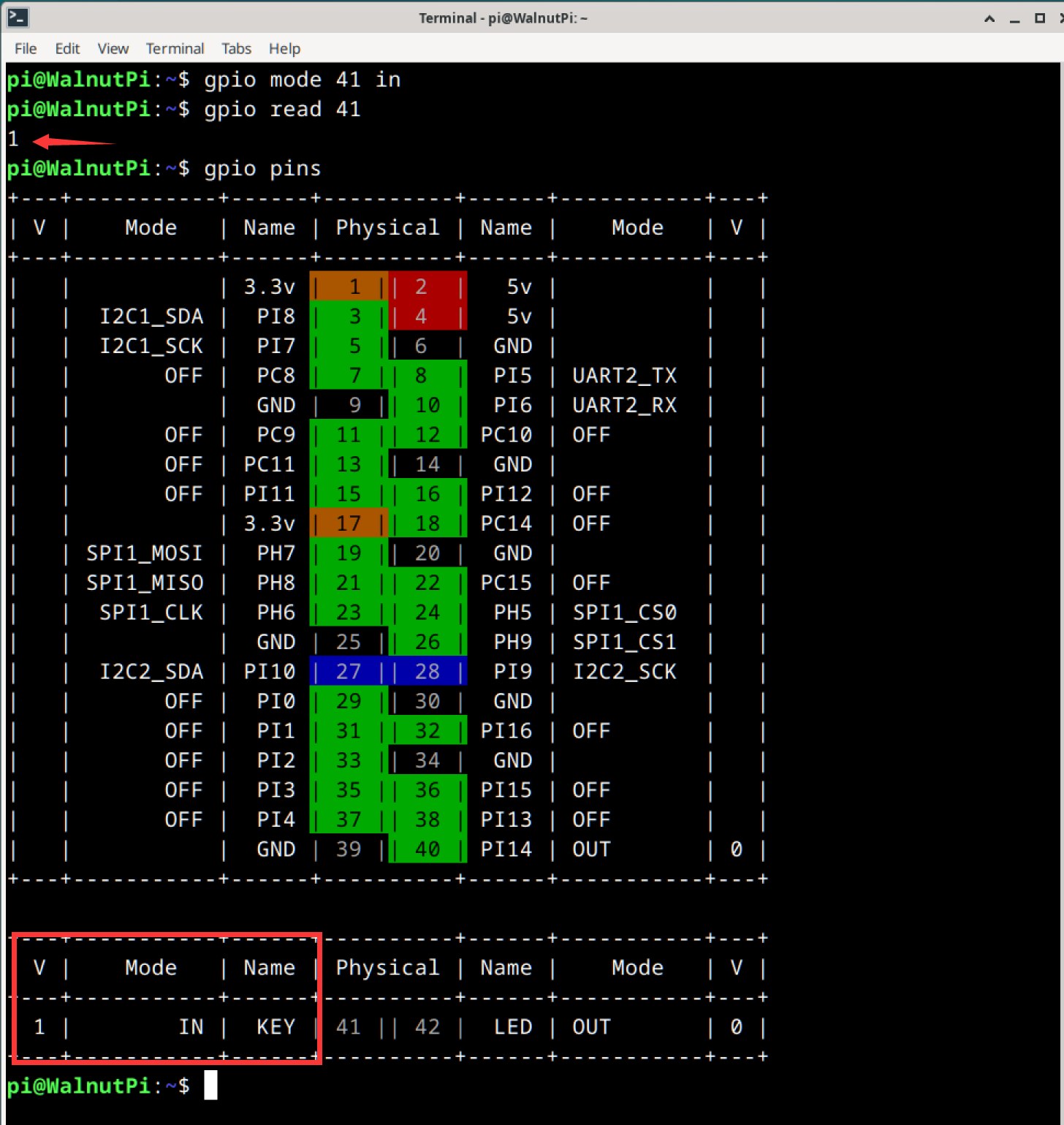
从前面查表可以看到按键KEY的wPi编号为41,因为板子上已经加了上拉电阻,只需要设置KEY引脚模式为输入即可:
gpio mode 41 in
先读取一下按键目前的电压状态:
gpio read 41
可以看到KEY的引脚状态为IN(输入),因为有上拉电阻存在,所以没有按下按键时引脚输入电平为1(高电平3.3V)。
接下来按着按键不要松手:
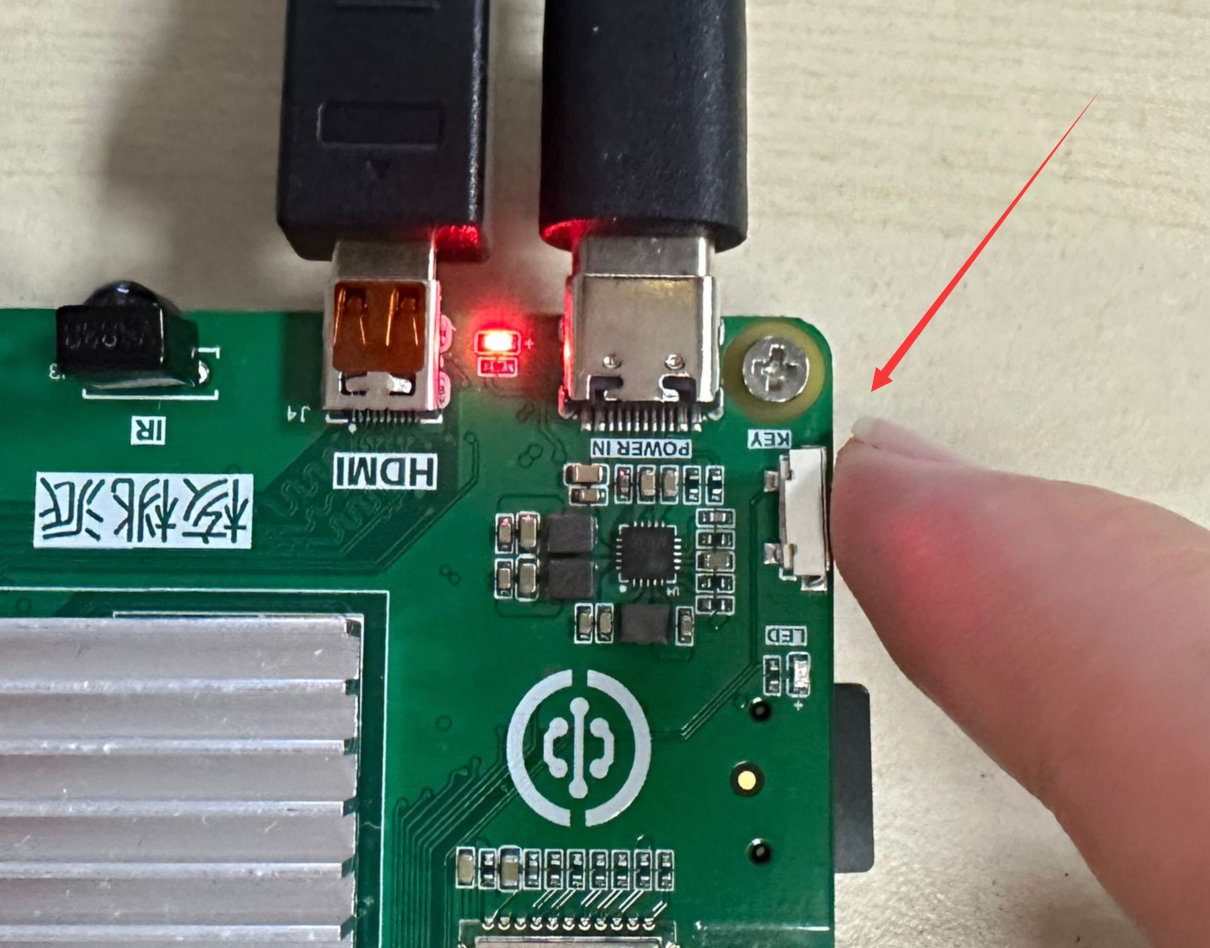
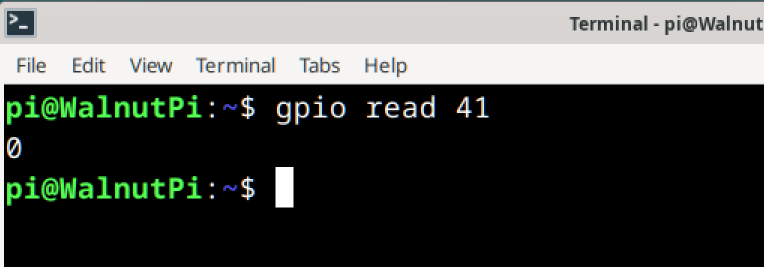
再执行读取电平指令,因为开关与地相连,会把引脚电平拉低,所以可以看到输入电平变为0(低电平0V)。
gpio read 41
翻转引脚输出电平
这个功能实现将一个输出模式的引脚电平变换,比如当前输出高电平,执行该指令后输出低电平,再次执行再翻转输出高电平。
gpio toggle [PIN]
[PIN]:输出引脚的wpi编号。
例如将板载LED输出状态翻转:
gpio toggle 42